
摘要:本教案是關(guān)于機(jī)器人認(rèn)路的教學(xué)方案,。通過本教案,,機(jī)器人能夠?qū)W習(xí)并識別不同的路線,提高其在復(fù)雜環(huán)境中的導(dǎo)航能力,。教學(xué)內(nèi)容包括機(jī)器人的基本路徑規(guī)劃,、路線識別技術(shù)、以及如何在不同場景中應(yīng)用所學(xué)知識,。本教案旨在幫助學(xué)生掌握機(jī)器人認(rèn)路的基本原理和操作方法,,培養(yǎng)其在實際應(yīng)用中的問題解決能力。
本文目錄導(dǎo)讀:
- 教學(xué)目標(biāo)
- 機(jī)器人認(rèn)路的基本原理和概念
- 機(jī)器人導(dǎo)航系統(tǒng)的基本構(gòu)成和工作原理
- 編寫簡單的機(jī)器人認(rèn)路程序
- 案例分析與實踐
- 教學(xué)方法與手段
- 講授法
- 案例分析法
- 實踐教學(xué)法
- 現(xiàn)代化教學(xué)手段
- 教學(xué)評價與反饋
- 課堂互動評價
- 作業(yè)評價
- 實踐評價
- 反饋與改進(jìn)
教學(xué)目標(biāo)
1,、理解機(jī)器人認(rèn)路的基本原理和概念,。
2、掌握機(jī)器人導(dǎo)航系統(tǒng)的基本構(gòu)成和工作原理,。
3,、學(xué)習(xí)編寫簡單的機(jī)器人認(rèn)路程序。
4,、培養(yǎng)分析問題和解決問題的能力,。
機(jī)器人認(rèn)路的基本原理和概念
機(jī)器人認(rèn)路是指機(jī)器人在未知環(huán)境中,通過感知周圍環(huán)境信息,,識別路徑并自主移動的過程,,機(jī)器人認(rèn)路技術(shù)涉及傳感器技術(shù)、計算機(jī)視覺,、人工智能等多個領(lǐng)域,,機(jī)器人通過傳感器獲取環(huán)境信息,如光線,、聲音,、距離等,然后通過算法處理這些信息,,識別出路徑并作出決策,,最終實現(xiàn)自主移動。
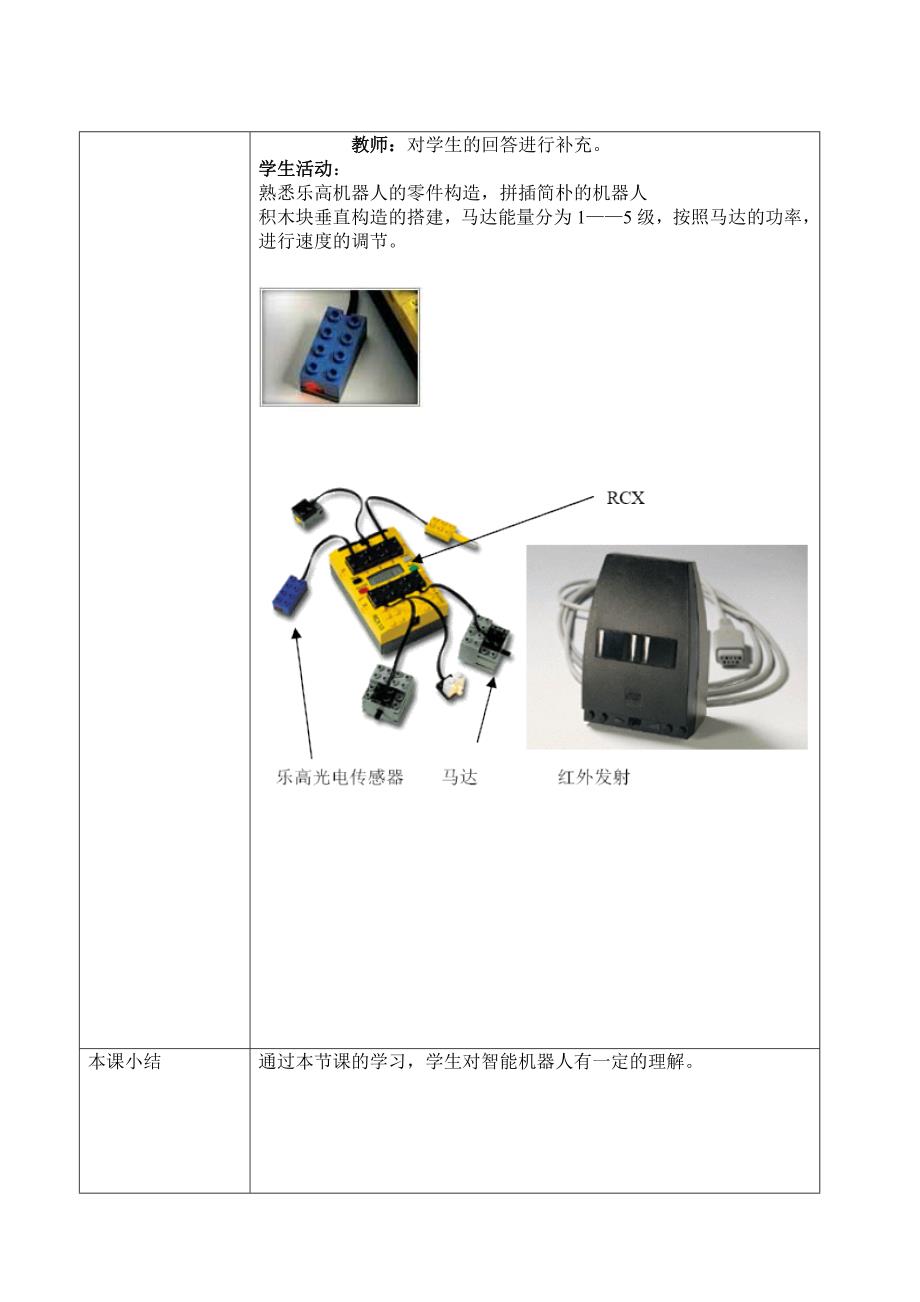
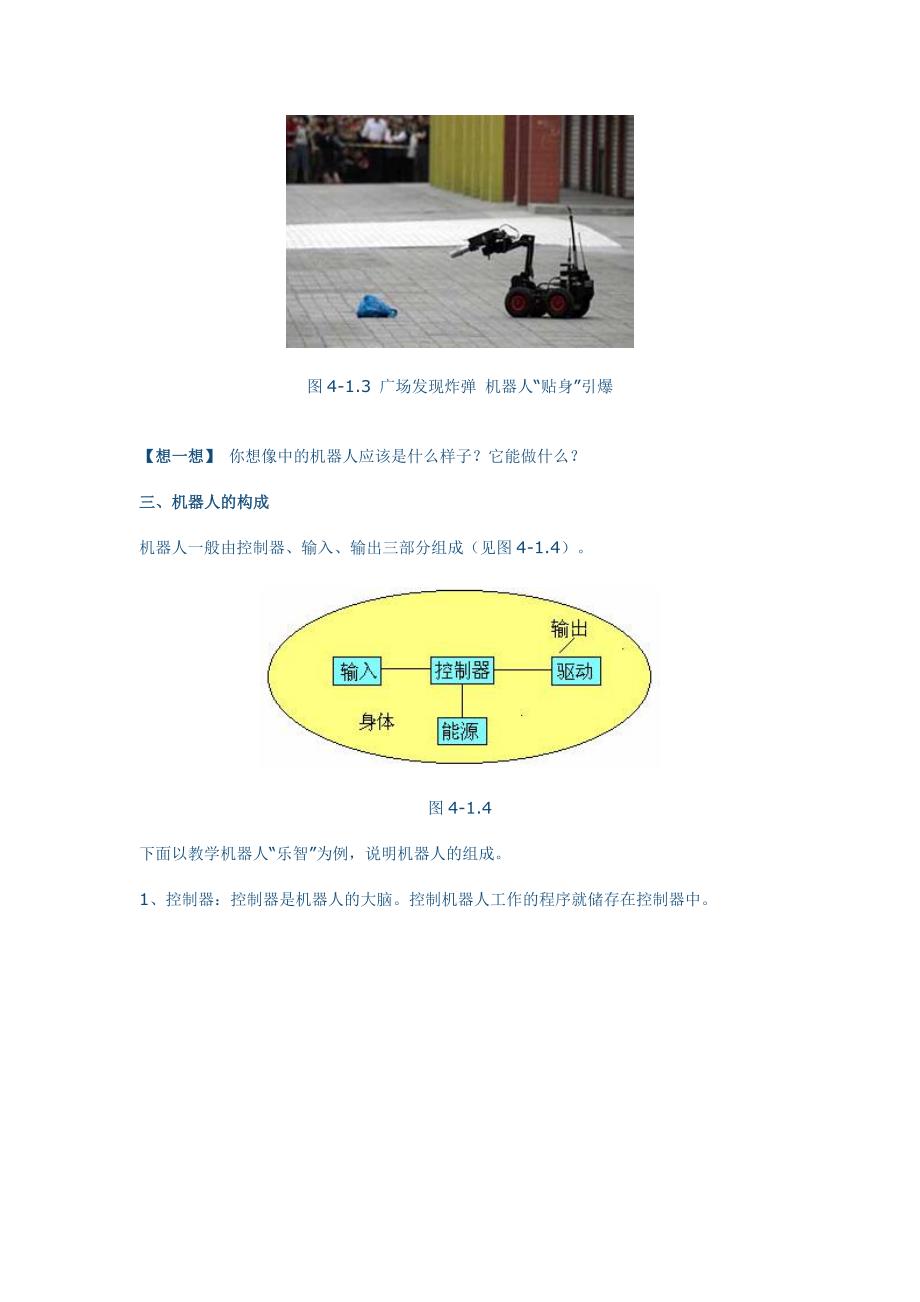
機(jī)器人導(dǎo)航系統(tǒng)的基本構(gòu)成和工作原理
機(jī)器人導(dǎo)航系統(tǒng)主要由傳感器,、控制器和執(zhí)行器等部分組成,,傳感器負(fù)責(zé)獲取環(huán)境信息,如攝像頭,、紅外傳感器等,;控制器負(fù)責(zé)處理傳感器獲取的信息,并根據(jù)預(yù)設(shè)算法作出決策,;執(zhí)行器負(fù)責(zé)實現(xiàn)機(jī)器人的移動,,如電機(jī)等,機(jī)器人導(dǎo)航系統(tǒng)的工作原理是:傳感器獲取環(huán)境信息,通過控制器處理并作出決策,,然后控制執(zhí)行器實現(xiàn)機(jī)器人的移動,。
編寫簡單的機(jī)器人認(rèn)路程序
以Arduino開源硬件平臺為例,介紹如何編寫簡單的機(jī)器人認(rèn)路程序,,需要為機(jī)器人安裝合適的傳感器(如紅外傳感器),,然后通過Arduino編程環(huán)境編寫程序,程序的主要功能包括:讀取傳感器數(shù)據(jù),、處理數(shù)據(jù)并作出決策,、控制執(zhí)行器實現(xiàn)機(jī)器人的移動,當(dāng)機(jī)器人遇到障礙物時,,紅外傳感器會感知到障礙物的存在,,然后程序會根據(jù)預(yù)設(shè)算法調(diào)整機(jī)器人的移動方向或停止移動,以避免碰撞,。
案例分析與實踐
通過具體案例,,分析機(jī)器人在不同環(huán)境中如何認(rèn)路,機(jī)器人在室內(nèi)和室外環(huán)境中認(rèn)路的區(qū)別和挑戰(zhàn),,在室內(nèi)環(huán)境中,機(jī)器人可以通過識別地標(biāo),、墻壁等特征進(jìn)行導(dǎo)航,;而在室外環(huán)境中,機(jī)器人需要識別道路,、行人,、車輛等更復(fù)雜的特征,還可以探討機(jī)器人在認(rèn)路過程中可能遇到的挑戰(zhàn),,如光線變化,、地形變化等,并討論如何解決這些問題,。
在實踐環(huán)節(jié),,可以讓學(xué)生親手操作機(jī)器人,體驗機(jī)器人認(rèn)路的原理和技術(shù),,可以組織一些有趣的實踐活動,,如機(jī)器人尋寶游戲、機(jī)器人跟隨任務(wù)等,,讓學(xué)生在實踐中掌握機(jī)器人認(rèn)路的基本原理和技術(shù),。
教學(xué)方法與手段
講授法
通過講授的方式,向?qū)W生介紹機(jī)器人認(rèn)路的基本原理和概念,,以及機(jī)器人導(dǎo)航系統(tǒng)的基本構(gòu)成和工作原理,,讓學(xué)生全面了解機(jī)器人認(rèn)路技術(shù)的基本知識和原理。
案例分析法
通過分析具體案例,,讓學(xué)生了解機(jī)器人在不同環(huán)境中如何認(rèn)路,,以及機(jī)器人在認(rèn)路過程中可能遇到的挑戰(zhàn)和解決方案,,幫助學(xué)生更好地理解機(jī)器人認(rèn)路的實際應(yīng)用和潛在挑戰(zhàn)。
實踐教學(xué)法
通過組織實踐活動,,讓學(xué)生親手操作機(jī)器人,,體驗機(jī)器人認(rèn)路的原理和技術(shù),讓學(xué)生在實踐中掌握機(jī)器人認(rèn)路的基本原理和技術(shù),,提高分析問題和解決問題的能力,。
現(xiàn)代化教學(xué)手段
利用多媒體教學(xué)設(shè)備、仿真軟件等工具,,輔助教學(xué),,可以通過視頻、動畫等形式展示機(jī)器人認(rèn)路的原理和技術(shù),,幫助學(xué)生更好地理解,;通過仿真軟件模擬機(jī)器人認(rèn)路的場景,讓學(xué)生在虛擬環(huán)境中進(jìn)行實踐,。
教學(xué)評價與反饋
課堂互動評價
通過觀察學(xué)生在課堂上的表現(xiàn),,評價學(xué)生對機(jī)器人認(rèn)路技術(shù)的理解和掌握情況,可以通過提問,、討論等方式,,引導(dǎo)學(xué)生積極參與課堂互動,提高學(xué)生的學(xué)習(xí)效果,。
作業(yè)評價
布置與機(jī)器人認(rèn)路相關(guān)的作業(yè),,如編寫簡單的機(jī)器人認(rèn)路程序、分析機(jī)器人認(rèn)路的案例等,,通過評價學(xué)生的作業(yè),,了解學(xué)生對機(jī)器人認(rèn)路技術(shù)的掌握程度和應(yīng)用能力。
實踐評價
通過組織實踐活動,,評價學(xué)生在實際操作中的表現(xiàn),,可以設(shè)定明確的實踐任務(wù)和評價標(biāo)隘,觀察學(xué)生在實踐中的操作能力和創(chuàng)新思維,,以及解決問題的能力和團(tuán)隊協(xié)作能力,。
反饋與改進(jìn)
根據(jù)教學(xué)評價結(jié)果,及時給予學(xué)生反饋和指導(dǎo),,針對學(xué)生在學(xué)習(xí)和實踐中存在的問題和不足,,提出改進(jìn)建議,幫助學(xué)生更好地掌握機(jī)器人認(rèn)路技術(shù),,根據(jù)教學(xué)評價結(jié)果,,對教案進(jìn)行改進(jìn)和優(yōu)化,提高教學(xué)質(zhì)量和效果。
 京ICP備20020039號
京ICP備20020039號