
摘要:本文介紹了機器人旋轉角度的控制技術,,提供精確操作的指南,。文章闡述了機器人旋轉角度控制的重要性,介紹了相關的控制技術,,包括傳感器,、算法和控制系統(tǒng)等方面的應用。本文旨在為機器人操作員提供清晰的指導,,以實現(xiàn)機器人的精確旋轉角度,,提高工作效率和精度。
本文目錄導讀:
隨著科技的飛速發(fā)展,,機器人技術已經(jīng)廣泛應用于各個領域,,在機器人操作中,旋轉角度的控制是確保機器人精確執(zhí)行任務的關鍵環(huán)節(jié),,無論是工業(yè)生產(chǎn)線上的自動化操作,,還是醫(yī)療、軍事,、服務等領域,,精確控制機器人的旋轉角度都是至關重要的,本文將詳細介紹機器人旋轉角度的控制技術,,幫助讀者了解并掌握這一關鍵技術,。
機器人旋轉角度控制的基本原理
機器人旋轉角度的控制主要依賴于先進的控制系統(tǒng)和算法,通過接收來自傳感器的數(shù)據(jù),,控制系統(tǒng)根據(jù)預設的程序或算法計算并控制機器人的運動,,在旋轉角度控制中,主要涉及到以下幾個關鍵要素:
1,、傳感器:用于檢測機器人的當前位置和姿態(tài),,以及環(huán)境信息。
2,、控制器:根據(jù)傳感器數(shù)據(jù)和預設指令,,計算并發(fā)出控制信號。
3,、驅動器:接收控制信號,,驅動機器人執(zhí)行旋轉動作。
4,、反饋機制:將機器人的實際運動狀態(tài)反饋給控制系統(tǒng),,以便進行實時調整。
機器人旋轉角度控制的主要方法
1,、編程控制:通過預設的編程指令控制機器人的運動,,這種方法適用于簡單,、重復的任務。
2、路徑規(guī)劃:根據(jù)任務需求,,預先規(guī)劃機器人的運動路徑和姿態(tài),,通過路徑規(guī)劃,可以精確控制機器人的旋轉角度,。
3,、實時反饋控制:通過傳感器實時獲取機器人的運動狀態(tài),并根據(jù)實際狀態(tài)調整控制信號,,這種方法適用于復雜環(huán)境或需要高精度操作的任務,。
機器人旋轉角度控制的實現(xiàn)過程
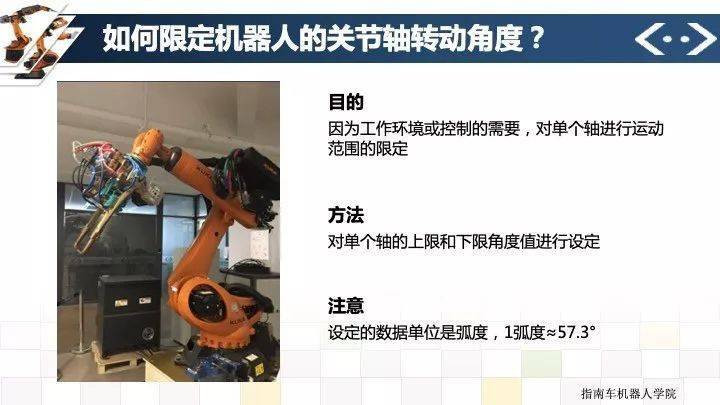
1、確定旋轉目標:根據(jù)任務需求,,確定機器人需要旋轉的角度,。
2、設定控制參數(shù):根據(jù)機器人的性能和環(huán)境條件,,設定合適的控制參數(shù),,如旋轉速度、加速度等,。
3,、編寫控制程序:根據(jù)設定的控制參數(shù)和目標角度,編寫控制程序,。
4,、測試和調整:在實際環(huán)境中測試控制程序的效果,并根據(jù)測試結果進行調整,。
5,、實時監(jiān)控和反饋:在機器人執(zhí)行任務過程中,,實時監(jiān)控其運動狀態(tài),并根據(jù)實際情況進行反饋和調整,。
影響機器人旋轉角度控制精度的因素
1,、傳感器精度:傳感器的精度直接影響機器人運動狀態(tài)的檢測精度。
2,、控制器性能:控制器的計算能力和處理速度影響控制精度。
3,、驅動器性能:驅動器的性能和穩(wěn)定性影響機器人執(zhí)行動作的精度,。
4、環(huán)境因素:如溫度、濕度,、電磁干擾等環(huán)境因素也可能影響機器人的控制精度,。
提高機器人旋轉角度控制精度的措施
1、采用高精度傳感器:提高傳感器的精度,,以提高機器人運動狀態(tài)的檢測精度,。

2,、優(yōu)化控制器設計:提高控制器的計算能力和處理速度,以更精確地控制機器人的運動,。
3,、選擇高性能驅動器:選擇高性能、穩(wěn)定的驅動器,,以提高機器人執(zhí)行動作的精度,。
4、校正和優(yōu)化算法:通過校正和優(yōu)化控制算法,,提高機器人的控制精度和穩(wěn)定性,。
5、適應環(huán)境變化的調整:針對環(huán)境因素對機器人控制精度的影響,,采取相應措施進行補償和調整,。
機器人旋轉角度的控制是機器人技術中的關鍵技術之一,通過深入了解機器人旋轉角度控制的基本原理,、方法,、實現(xiàn)過程和影響精度的因素,我們可以更好地掌握這一技術,,并采取相應的措施提高控制精度,,隨著科技的不斷發(fā)展,我們有理由相信,,機器人旋轉角度控制技術將在未來得到更加廣泛的應用和發(fā)展,。
 京ICP備20020039號
京ICP備20020039號