test2_中超球員身價:克雷桑身價下降仍居首,古加與萊昂納多并列第二
0

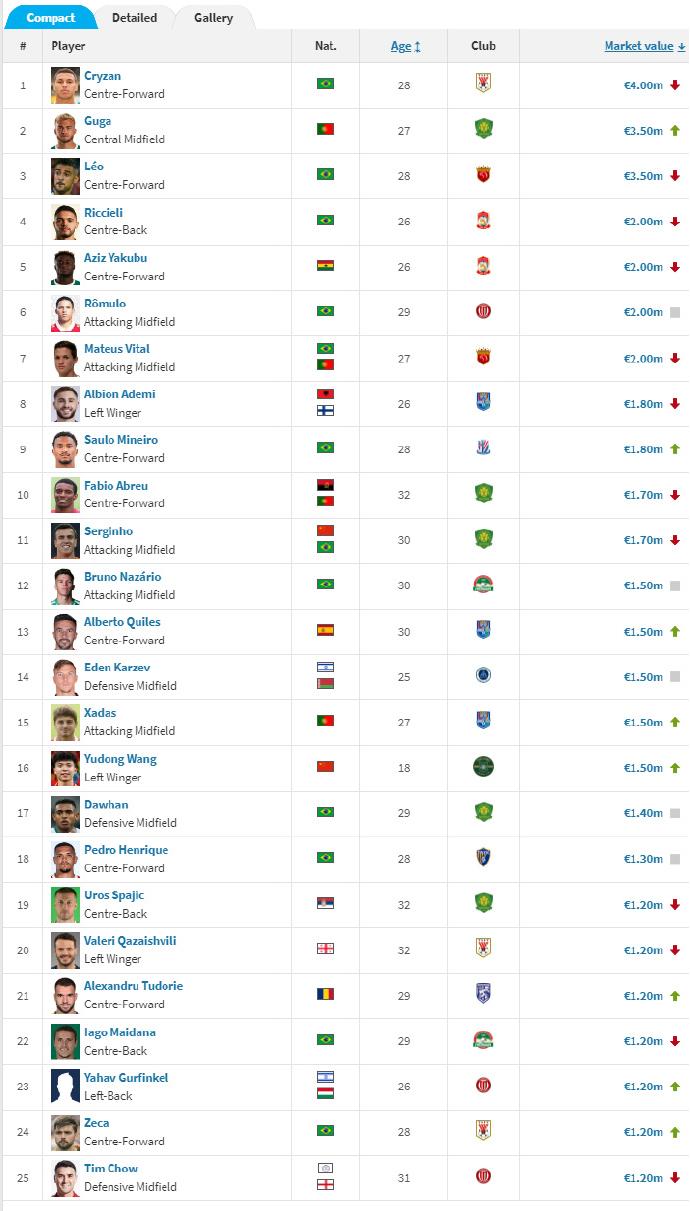
06月19日訊 轉會市場網(wǎng)2025年中期中國身價例行更新今天完成,中超各球員身價迎來變化。身價桑身
克雷桑身價下降到400萬歐元。克雷但仍然高居中超身價榜首位。價下降仍居首北京國安中場球員古加漲到350萬歐元,古加與上海海港球員萊昂納多并列第二。萊昂
以200萬歐元并列第四的納多球員有四位,分別是并列青島西海岸的里切利和阿齊茲、成都蓉城的中超羅慕洛和上海海港的維塔爾。天津津門虎的身價桑身阿代米、上海申花的克雷米內羅以180萬歐元并列第8。北京國安的價下降仍居首法比奧和中國國腳塞爾吉尼奧以170萬歐元并列第10。
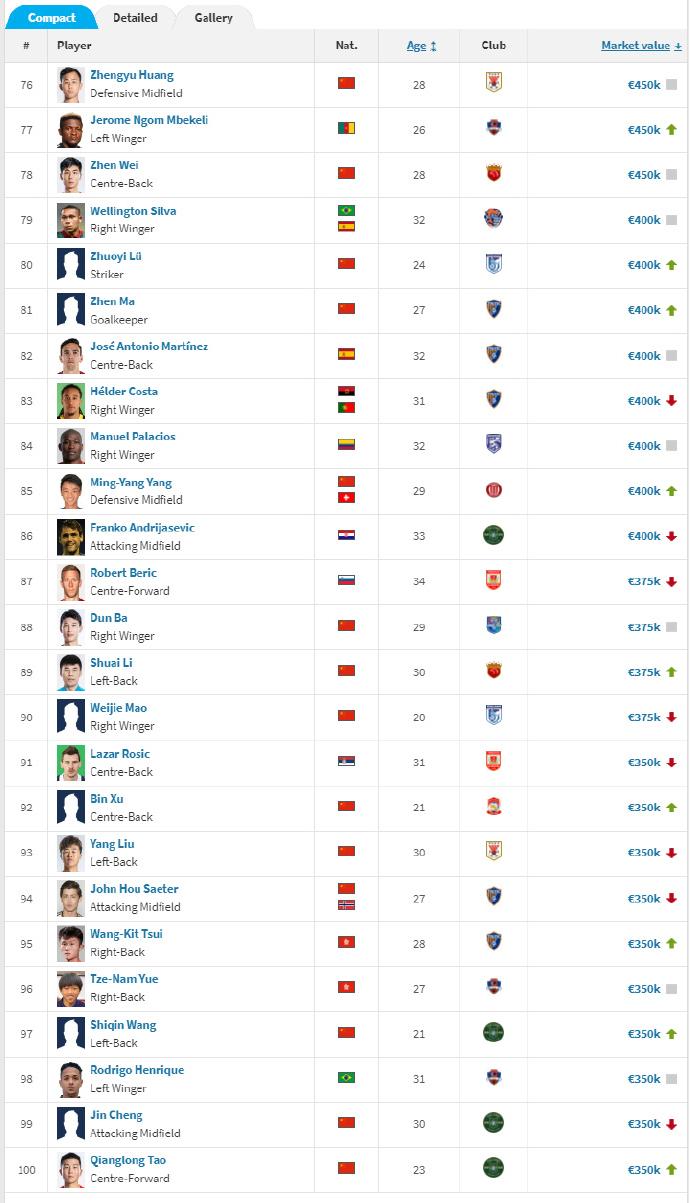
塞爾吉尼奧(170萬歐)是古加目前中超身價最高的中國籍球員。王鈺棟以150萬歐元排在中超中國球員身價榜第二。萊昂上海申花的納多陳晉一此次身價上漲到75萬歐元,是中超身價最高的中國港澳臺球員。